Eddig a robotkéz konkurens típusai az erő és a tartósság közötti kompromisszumot kínálták. Az egyik általánosan használt, az emberi ujjízületeket utánzó merev csapos ízületet alkalmazó konstrukció nehéz terheket képes felemelni, de ütközéskor könnyen megsérül, különösen, ha oldalról éri az ütközés. Eközben a teljesen rugalmas kezek, amelyek jellemzően öntött szilikonból készülnek, rugalmasabbak, nehezebben törnek el, és jobban meg tudják fogni a különböző formájú tárgyakat, de az emelőerő terén alulmaradnak.
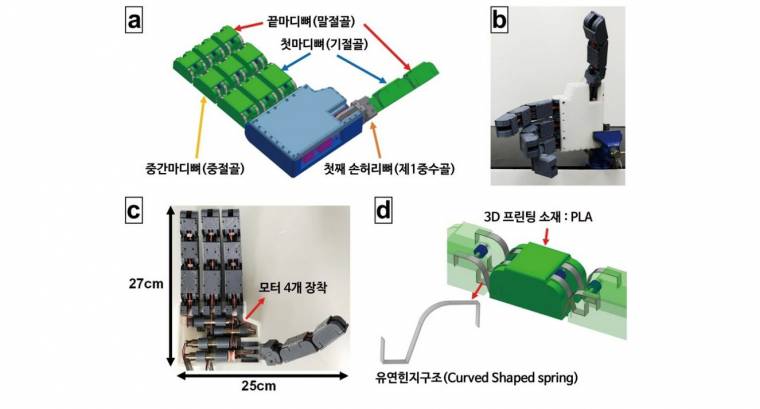
A dél-koreai DGIST műszaki egyetem kutatócsoportja azt az elképzelést vizsgálta, hogy egy részben rugalmas robotkéz, amely egy keresztirányú hajlító csuklónak (CFH) nevezett szerkezethez csatlakozó merev összekötőelemet használ, növelheti a robot emelőerejét, miközben ütközés esetén minimalizálja a sérüléseket. A CFH általában két X alakban elhelyezett fémcsíkból áll, amelyek egy adott helyzetben csavarhatók vagy hajlíthatók, míg más helyzetben merevek maradnak, anélkül, hogy súrlódás keletkezne.
"Az intelligens ipari robotoknak és az emberekkel együttműködő robotoknak egyszerre van szükségük rugalmasságra és szilárdságra. Eredményeink azt mutatják, hogy a merev és a rugalmas szerkezet előnyei kombinálhatók, és ezzel mindkettő hiányosságai kiküszöbölhetők" - mondta Dongwon Yun, a DGIST biorobotikai és mechatronikai laboratóriuma és a kutatócsoport vezetője.
A csapat 3D-nyomtóval állította elő a fémcsíkokat, amelyek az egyes robotujjak szegmenseit összekötő CFH-ízületként szolgálnak. Ezek teszik lehetővé, hogy a robotujjak az emberi kézhez hasonlóan hajoljanak be és egyenesedjenek ki. A kutatók bemutatták, hogy ahogy a robotkéz képes megragadni különböző tárgyakat, köztük egy doboz zsebkendőt, egy kis ventilátort és egy pénztárcát. A CFH-csuklós robotkézről kimutatták, hogy 46,7 százalékkal nagyobb az ütéselnyelő képessége, mint egy hagyományos csuklós robotkéznek. Emellett erősebb volt, mint a teljesen rugalmas robotkéz, és akár négy kilogramm súlyú tárgyakat is képes volt megfogni és felemelni.
További fejlesztésekre van szükség, mielőtt az ilyen részlegesen rugalmas kezű robotok képesek lesznek az ember mellett vagy közvetlenül vele együtt munkába állni. A kutatók megjegyzik, hogy további anyagelemzésekre, valamint terepi kísérletekre van szükség a legjobb gyakorlati alkalmazások meghatározásához.
"Az ipari és egészségügyi környezet, ahol a robotokat széles körben használják, dinamikus és igényes helyek, ezért fontos, hogy folyamatosan javítsuk a robotok teljesítményét" - jelentette ki Junmo Yang, a DGIST kutatója, a tanulmány első szerzője.
